
Si vous avez déjà passé un peu de temps à regarder de près votre GPS, vous avez certainement dû voir qu’il est bourré de paramètres de configuration. Vous avez peut-être aussi été surpris la première fois que vous avez tenté de parcourir sur la carte la dernière trace enregistrée par tous les points « erratiques » générés.
Bizarre, bizarre. Vous avez dit bizarre ?
Bon, ce n’est pas si bizarre, mais du coup cela en dit long sur la capacité d’un GPS à reproduire fidèlement la réalité.
En fait, avec un GPS qui permet le paramétrage de la fréquence d’enregistrement des données, on aura l’intuition de choisir l’échantillonnage le plus rapide. On se dit, plus il y aura de points, mieux ça sera !
Mais est-ce vraiment un bon choix pour obtenir une trace au plus proche de la réalité ? 🤔
Regardons cela de plus près, c’est un tout petit peu technique (y'a pas d'intégrales ne vous inquiétez pas...), et on vous accompagne.
Les effets de la marge d’erreur
Dans le monde numérique, la notion de quantification a toujours des impacts plus ou moins diffus.
De manière contre-intuitive, ce qui peut sembler être le meilleur choix, à savoir, utiliser la plus haute fréquence d’enregistrement des points d’une trace peut s’avérer contre-productif.
Définition : Un FIX est la capacité du GPS à calculer la position (latitude, longitude, altitude) en fonction des satellites.
Une [publication, outre atlantique, faite suite à une campagne de mesure] (https://www.tandfonline.com/doi/pdf/10.1080/13658816.2015.1086924) indique que lorsque les conditions de réception sont les plus favorables, c’est-à-dire un ciel bleu azur 🌞 et un GPS placé en vue de l’horizon sur 360°, **la précision d’un FIX est de 3,35 m dans 95 % des cas. **
⚠️ Concrètement sur 100 FIX consécutifs, votre GPS, vous géolocalise entre 0 et 3,35 m de votre position réelle 95 fois et 5 fois il vous géolocalise au-delà.
En vertical, il est admis que l’erreur c’est 1,5 fois l’erreur horizontale donc 95 fois sur 100 l’altitude enregistrée sera à +/- 5 m de l’altitude réelle en condition de réception optimale, ce qui est souvent difficile à proximité du sol.
De plus, les différentes publications disponibles démontrent que la réception multiconstellation 🛰 (GPS + GLONASS + Galileo) n’améliore pas la précision horizontale GPS.
En revanche, un récepteur GPS ayant la capacité d’interprétation du signal de plusieurs constellations de satellites, aura les améliorations suivantes :
- Réduction de la durée du premier FIX, car le nombre de satellites étant plus grand le récepteur en verra un plus grand nombre dès sa mise en route,
- amélioration de la précision de localisation en condition de réception difficile. C’est le cas en ville 🏙 (canyons urbains), en fond de vallée en région de montagnes ou en forêt.
Vous pouvez faire l’essai avec votre GPS : le constat est net et sans appel.

La puce GPS établit un FIX chaque seconde en général.
Presque tous les GPS vélo ou outdoor permettent d’ajuster la fréquence d’enregistrement de ces FIX dans la trace (GPX). Soit ils sont tous enregistrés, choix de 1 par seconde, soit le GPS en prend 1 sur N (un toutes les 3 secondes par exemple), ou le paramétrage se fait sur la distance.
Chaque FIX consiste à déterminer la position (latitude, longitude, altitude, vitesse) ; la distance entre deux FIX est obtenue en calculant l’arc du cercle (placé sur la circonférence du globe terrestre 🌎) qui passe par deux FIX consécutifs.
La distance totale du parcours est la somme de ces intervalles de distance.
En principe, tous les GPS font ce calcul pour produire la distance parcourue sans tenir compte de l’altitude, ensuite ils intègrent une correction pour tenir compte de l’altitude. Un calcul similaire est fait pour l’altitude.
Donc : Plus il y a de FIX, plus l’enregistrement épouse le trajet réel, mais plus il intégrera une fraction de l’erreur de position horizontale et verticale.

Illustration : En vert le trajet réel en ligne droite pour simplifier le raisonnement, en rouge les FIX du GPS a 1 Hz avec la matérialisation de l’incertitude de position autour de chaque FIX : La position réelle est toujours dans ce cercle, mais sans être centrée, et en bleu le transfert dans le GPX s’il est fait toutes les 3 secondes. En mauve l’erreur d’altitude mesurée par le GPS ([voir ce tuto pour l’éliminer] (/blog/altitude-gps-strava-inexacte).
L’incertitude de position est inférieure à 4 m dans 95 % des cas en parfaite condition de réception. La première conséquence est qu’entre deux FIX consécutifs, si le déplacement est inférieur à l’incertitude de position, le déplacement enregistré par ce FIX contient une forte proportion de cette incertitude : c’est le bruit de mesure.
Par exemple, pour une vitesse de 20 km/h, vous vous déplacez de 5,5 m chaque seconde ; bien que tout soit parfait, votre GPS peut mesurer un déplacement de 5,5 m +/- X m, la valeur de X sera comprise entre 0 et 4 m (pour une incertitude de position de 4 m), il va donc placer ce nouveau FIX a une position espacée entre 1,5 m et 9,5 m du précédent.
Dans le cas le plus défavorable, l’erreur sur le calcul de cet échantillon de la distance parcourue peut atteindre +/- 70 %, alors que la classe de performance du GPS est excellente !
Vous avez probablement déjà constaté qu’à vitesse constante en plaine et par beau temps ☀️, les points de votre trace ne sont pas régulièrement espacés : plus la vitesse est faible, plus ils se dispersent.
À 100 km/h l’impact de l’erreur se réduit de 60 %, alors qu’à 4 km/h, vitesse d’un marcheur il passe à 400 %, il suffit d’observer la trace GPX d’un randonneur pour constater que c’est toujours très « tarabiscoté ».
Par conséquence :
- plus la fréquence d’enregistrement est élevée,
- et plus la vitesse est faible,
- plus la distance et l’altitude de chaque FIX seront erronées.
En enregistrant tous les FIX dans votre GPX, sur un parcours d’une heure soit 3600 enregistrements vous avez cumulé 3600 fois une fraction de l’erreur horizontale et verticale du GPS, en réduisant, par exemple, la fréquence d’un facteur 3 ce ne serait plus que 1200 fois.
👉 Autre point : La précision verticale d’un GPS n’est pas bonne, une fréquence d’enregistrement trop élevée va amplifier cette lacune 😬.
Quand la vitesse augmente, progressivement la distance parcourue entre deux FIX consécutifs devient prépondérante par rapport à l’incertitude de position. Le cumul des distances et altitudes entre tous les FIX consécutifs enregistrés dans votre trace, c’est-à-dire la distance totale et le profil vertical de ce parcours seront de moins en moins affectés par l’incertitude de position.

Comment contrer ces effets indésirables ?
Commençons par identifier des classes de vitesses selon la mobilité :
- 🚶🚶♀Randonnée de groupe, la vitesse moyenne est lente de l’ordre de 3 à 4 km/h soit 1 m/s.
- 🚶En mode Randonnée plus sportive, la classe de vitesse moyenne passe de 5 à 7 km/h soit autour de 2 m/s.
- 🏃 En mode Trail ou Course à pied, la classe de vitesse usuelle est entre 7 et 15 km/h soit autour de 3 m/s.
- 🚵 À VTT on peut considérer une vitesse moyenne se situant entre 12 et 20 km/h soit de l’ordre de 4 m/s.
- 🚲 En cyclisme sur route, la vitesse est plus élevée entre 5 et 12 m/s.
Pour la randonnée il faut donc privilégier un enregistrement par pas de distance de 10 à 15 m, l’erreur d’imprécision du GPS ne sera prise en compte que 300 fois par heure (environ) au lieu de 3600, et l’impact de l’erreur de position, qui passe de 4 m maximum tous les 1 m, à 4 m maximum tous les 15 m, sera réduite d’un facteur 16. La trace sera bien plus lisse et plus propre, la prise en compte du bruit de mesure est divisée par un facteur 200 ! Un point tous les 10 à 15 m ne gommera pas la restitution des épingles dans les lacets, il seront juste un peu plus segmentés et moins bruités.
Pour le trail dans l’hypothèse d’une vitesse moyenne de 11 km/h, un enregistrement par pas en temps qui passe de 1 chaque seconde à 1 toutes les 5 secondes réduit le nombre d’enregistrements de 3600 à 720 par heure, et l’erreur maximale (possible) de 4 m tous les 3 m devient 4 m tous les 15 m (soit de 130 % à 25 % !). La prise en compte des erreurs par la trace enregistrée est réduite d’autant de l’ordre d’un facteur 25. Seul bémol, les trajectoires ayant une courbure serrée risquent d’être un peu segmentées. « Risque »** car bien que ça soit du trail la vitesse chute inévitablement dans les courbes, et par voie de conséquence deux FIX consécutifs vont se rapprocher ce qui atténue l’effet de segmentation.
Le VTT est à la charnière entre les basses vitesses (< 20 km/h) et les vitesses moyennes (> 20 km/h), dans le cas d’un circuit ayant un profil lent à très (< 15 km/h) lent une fréquence de 5 s est un bon compromis (idem Trail), si c’est un profil type XC (> 15 km/h) retenir 3 s semble le bon compromis.
Pour un profil d’utilisation à des vitesses plus élevées (DH), choisir une ou deux secondes comme fréquence d’enregistrement.
Pour une vitesse de 15 km/h, le choix d’opter pour une fréquence d’enregistrement de la trace de 1 s à 3 s réduit la prise en compte de l’erreur GPS d’un facteur 10 environ. Vu qu’en principe le rayon de virage est lié à la vitesse, la restitution fine de la trajectoire dans les épingles ou courbures serrées ne sera pas affectée.
Conclusion
Les GPS récents disponibles pour les activités outdoor et le vélo permettent d’obtenir la précision de localisation constatée par l’étude citée en début d’article.
En optimisant la fréquence d’enregistrement à votre vitesse moyenne de progression, vous allez réduire significativement l’erreur de distance et d’altitude de votre trace GPX : votre trace sera plus lisse, restera bien sur les chemins.
La démonstration est basée sur des conditions de réceptions parfaites, lorsque ces conditions de réceptions se dégradent 🌧 (nuages, canopée, vallée, ville.), l’incertitude de position croît rapidement les effets indésirables d’une fréquence élevée d’enregistrement des FIX à basse vitesse vont s’amplifier.
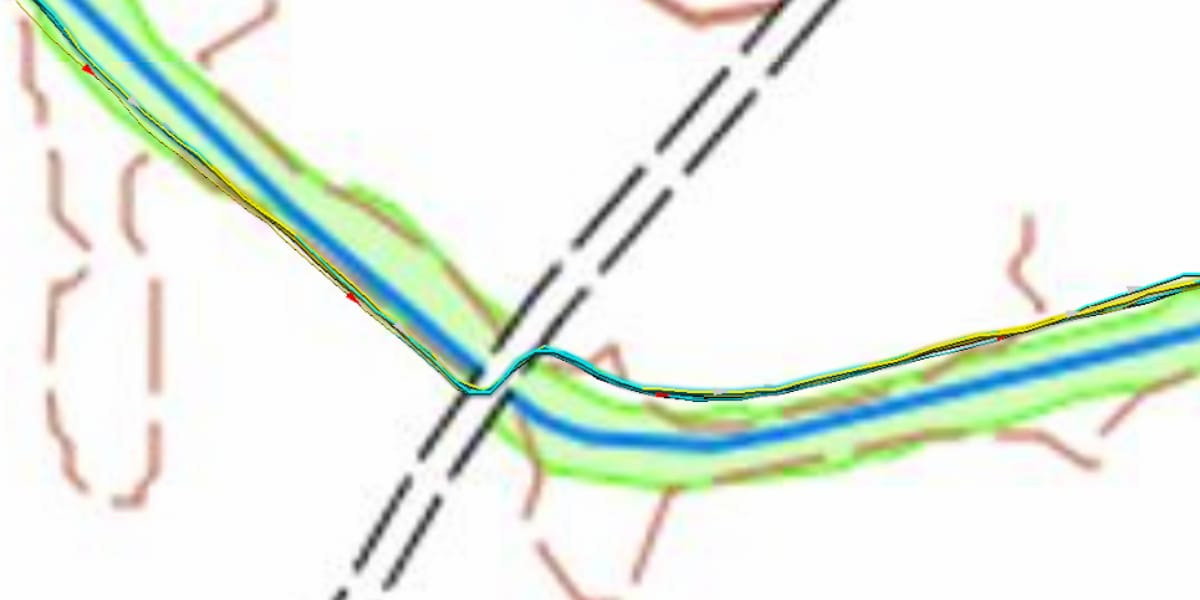
L’image ci-dessus présente le passage d’une « baïonnette » en terrain dégagé, sans masque, afin d’observer uniquement l’effet de la fréquence de transfert des FIX dans le fichier GPX.
Il s’agit de quatre traces enregistrées lors d’entraînement type Trail (course à pied) à 10 km/h. Ils ont été choisis au hasard répartis sur une année.
Trois enregistrements (traces) sont alimentés par un FIX toutes les 3 secondes et un par un FIX toutes les 5 secondes.
Première observation : la restitution de la trajectoire sur le passage de la baïonnette n’est pas dégradée, ce qu’il fallait démontrer.
Seconde observation : les « petits » écarts latéraux observés sont tous sur les traces « échantillonnées » à 3 secondes.
Le même constat est obtenu en comparant les traces enregistrées aux fréquences de 1 s et 5 s (pour cette gamme de vitesse), la trace construite par des FIX espacés de 5 secondes (pour cette gamme de vitesse) est plus propre, la distance globale et le dénivelé seront plus proches de la valeur réelle.
A VTT on règlera donc la fréquence d’enregistrement des positions GPS entre 2 s (DH) et 5 s (balade).
📸 A.S.O./Aurélien VIALATTE - Cristian Casal / TWS